
当RK3576的强劲“大脑”(四核A72+四核A53)与强大的GPU、VPU、NPU加速模块相遇,一场高性价比的机器人开发革命正在悄然发生。我们成功将完整的Ubuntu 22.04与ROS2 Humble生态系统,完美移植到了这颗国产芯片上。一个稳定、全功能的机器人软件开发平台已经就绪,现在就来一起探索它的强大魅力!
一、系统启动与基础性能展示
1.硬件平台简介
开发板:MYD-LR3576
存储:eMMC 64GB
内存:8GB LPDDR4
登录信息:root/123456或myir/123456
2.系统基本信息
版本:Ubuntu 22.04.5 LTS
启动速度:HDMI 3秒显示Logo,25秒进入桌面
3.资源占用实测
磁盘使用情况
:
Filesystem Size Used Avail Use% Mountedon/dev/root 57G 13G 42G 23% /
内存状态:
Mem: 7.7Gi total,760Mi used,6.4Gi free
CPU负载情况:
8核CPU在空闲状态下利用率接近0%,系统响应迅速。
4.桌面环境展示
默认搭载轻量级Xfce4桌面,简洁流畅。
5.系统功能介绍
功能 |
描述 |
支持情况 |
调试工具 |
Debug串口、adb、ssh |
完全支持 |
浏览器 |
支持GPU/VPU硬件加速 |
默认支持 |
网络连接 |
以太网、WiFi、蓝牙 |
桌面可控 |
多媒体 |
VPU硬解视频播放 |
流畅支持 |
AI能力 |
NPU推理,支持RKNN模型 |
默认支持 |
容器化 |
Docker引擎 |
开箱即用 |
二、ROS2核心功能测试
1.
环境验证
ROS_VERSION=2ROS_DISTRO=humbleROS_PYTHON_VERSION=3
确认运行ROS2 Humble长期支持版,生态完整。
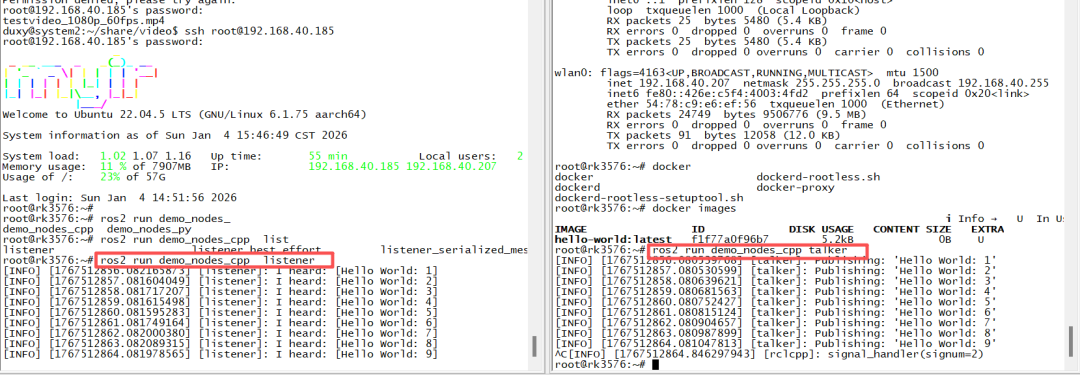
2.通信测试
话题发布/订阅:C++与Python节点通信正常,跨终端交互流畅。
使用C++演示
左边窗口ssh登录,订阅模式; 右边窗口debug连接,话题发布
使用Python演示
3.性能表现
root@rk3576:~# ros2 topic hz /chatteraveragerate:1.001 min:0.999s max:0.999s std dev:0.00018s window:3averagerate:1.001 min:0.999s max:1.000s std dev:0.00021s window:5averagerate:1.001 min:0.999s max:1.000s std dev:0.00021s window:7averagerate:1.001 min:0.999s max:1.000s std dev:0.00027s window:9averagerate:1.001 min:0.999s max:1.000s std dev:0.00029s window:11averagerate:1.001 min:0.999s max:1.000s std dev:0.00029s window:13
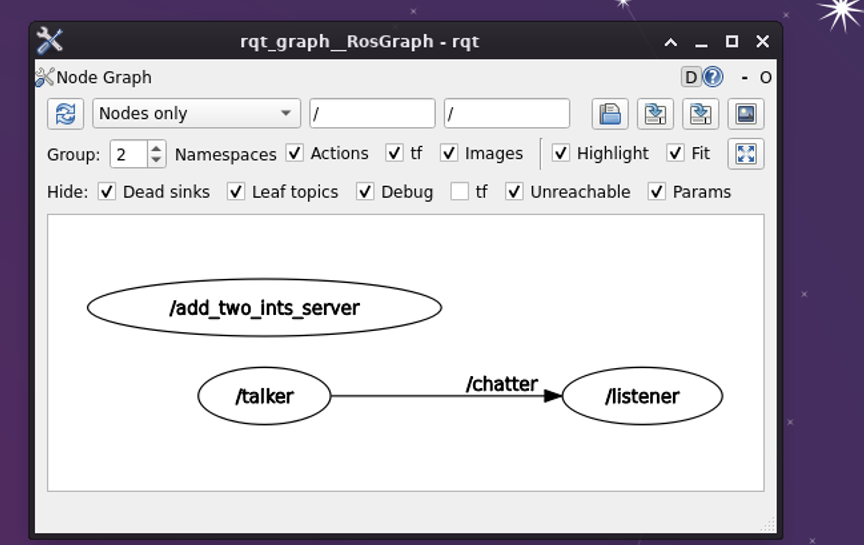
4.可视化工具
rqt_graph:清晰展示节点拓扑,系统架构一目了然。
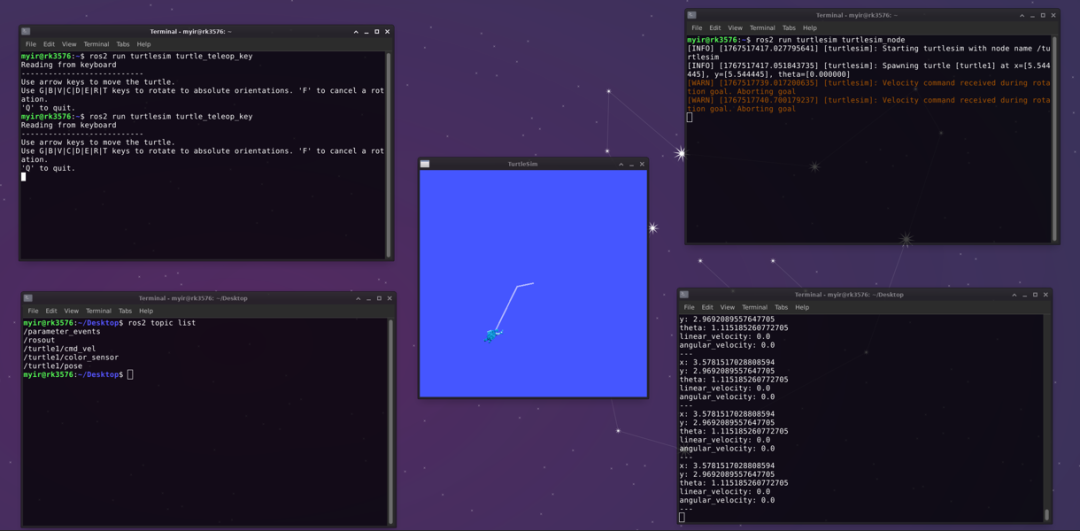
5
.小乌龟-Turtlesim经典演示
终端1启动”小乌龟”
ros2run turtlesim turtlesim_node
终端2开启键盘控制
ros2run turtlesim turtle_teleop_key
终端3开启查看活跃话题
ros2topic list
终端4查看乌龟实时位置
ros2 topicecho/turtle1/pose
三、RVIZ2三维可视化实战
1.启动与界面
启动命令
Ros2run rviz2 rviz2
界面
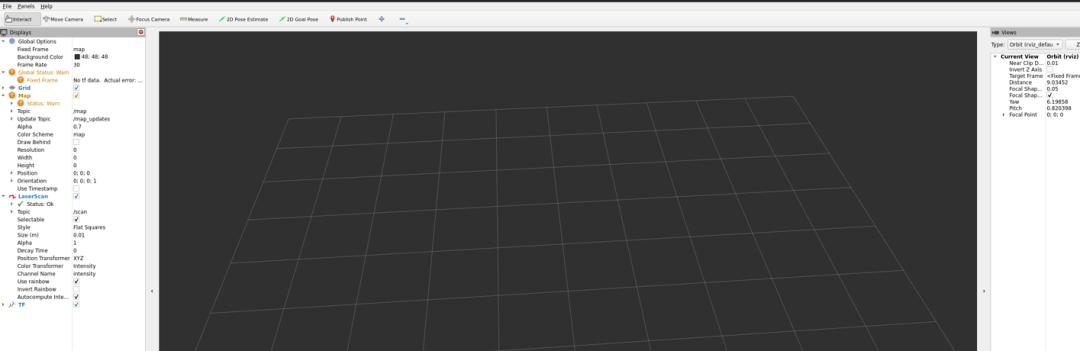
成功启动RVIZ2,界面加载完整,支持3D可视化交互。
2. 机器人模型加载
aptinstall ros-humble-urdf-tutorialros2launch urdf_tutorial display.launch.py model:=urdf/01-myfirst.urdf
3.性能实测
2K分辨率全屏:CPU占用约60%
GPU负载:36%@700MHz
渲染体验:操作流畅,视角切换无卡顿
四、总结与展望
RK3576平台完全具备运行完整ROS2生态的能力,性能满足:
机器人算法开发与调试
三维可视化与仿真
多传感器数据融合处理
教育实验与原型验证
米尔基于RK3576开发板
核心优势
1. 国产化价值:全链路自主可控,助力机器人领域国产替代
2.成本优势:千元级开发板实现完整ROS2开发环境
3.功耗表现:典型场景功耗优于同性能x86平台
4.生态完整:Ubuntu+ROS2+丰富外设驱动
未来计划
进一步优化GPU驱动,提升3D渲染性能
集成SLAM、导航等实际机器人应用栈
推动在AGV、服务机器人等场景的落地应用
给开发者的建议
推荐场景:
高校机器人课程教学平台
机器人算法研究与原型验证
轻量级机器人产品开发
注意事项:
建议使用SSD或高速TF卡提升IO性能
复杂3D场景可适当降低渲染质量
多节点应用注意内存分配优化
 米尔电子最新“明星产品”速报
米尔电子最新“明星产品”速报





- 随机文章
- 热门文章
- 热评文章
- 河南:固强补弱推动文旅产业成支柱,河南:固强补弱推动文旅产业成支柱
- (乡村行·看振兴)土鸡坐上无人机 江西南康“空中快递员”助振兴,(乡村行·看振兴)土鸡坐上无人机 江西南康“空中快递员”助振兴
- 直击广东怀集受灾现场:县城八成受浸 清淤工作全面展开,直击广东怀集受灾现场:县城八成受浸 清淤工作全面展开
- 百市千县中医药文化惠民活动走进上海 专家:芳香疗法需辨识体质、用天然香药,百市千县中医药文化惠民活动走进上海 专家:芳香疗法需辨识体质、用天然香药
- 深圳铁路7月1日起实行新运行图 高铁动卧添新方向,深圳铁路7月1日起实行新运行图 高铁动卧添新方向
- 南博会:“云南元素”文创吸睛 众多产品热销海内外,南博会:“云南元素”文创吸睛 众多产品热销海内外
- 湖南这座县城,何以缔造“辣条王国”?,湖南这座县城,何以缔造“辣条王国”?
- 万科“回血”:已完成所有A股库存股出售
- 1[风险]嘉实原油LOF (160723): 嘉实原油证券投资基金(QDII-LOF)溢价风险提示公告
- 2广西三地接连发布公告:禁止前往!后果自负!
- 3甜蜜的事业,幸福的滋味……
- 4SCADA系统的NAT转换与网段隔离解决方案
- 5芦苇任中国邮政集团副总经理
- 6A股三大股指集体收涨,沪指续创10年新高,A股三大股指集体收涨,沪指续创10年新高
- 7穆勒矩阵椭偏仪:DVRMME技术的系统误差建模与校准补偿
- 8政策定调催生新主线,A股跨年行情蓄势待发
- 1废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变,废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变
- 2文科生也可以学医了!多所高校中医学类专业选科放宽,文科生也可以学医了!多所高校中医学类专业选科放宽
- 3湖南零陵发展数字农业 现代农民种粮更轻松,湖南零陵发展数字农业 现代农民种粮更轻松
- 4上午买食材、下午逛潮店 古城老菜场人气足,上午买食材、下午逛潮店 古城老菜场人气足
- 5广东怀集所有国省道主线均已抢通,广东怀集所有国省道主线均已抢通
- 6520分钟攻坚!成渝中线高铁成都站改建工程进度过半,520分钟攻坚!成渝中线高铁成都站改建工程进度过半
- 7广东清远连山紧急转移8名村民 避险山体滑坡,广东清远连山紧急转移8名村民 避险山体滑坡
- 8中意经典著作互译出版项目启动 四部重磅作品首批入选,中意经典著作互译出版项目启动 四部重磅作品首批入选